Identification of MIMO continuous-time state-space models
This research line deals with the problem of continuous-time model identification within the subspace-based framework, with soecific reference to the case of systems operating in closed loop. The algorithms are developed by reformulating the identification problem from
the continuous-time model to equivalent ones to which discrete-time subspace identification
techniques can be applied. More precisely the projection of the input–output data onto
an orthonormal basis, defined in terms of Laguerre filters, is used to this purpose. The
Predictor-Based Subspace Identification, originally developed in the case of discrete-time
systems, can be reformulated for the continuous-time case.
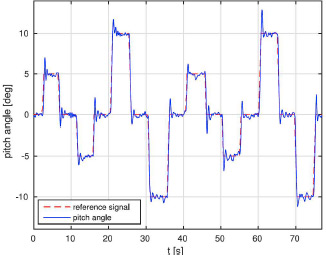
Data-driven controller design:
Data-driven controller design methods allow a fast tuning of controller parameters directly from data, relying on limited prior knowledge of the plant dynamics. This research line deals with the problem of tuning the attitude and the position control systems of multirotor UAVs using a data-driven approach.
Specifically, solutions based on data collected in flight, during closed-loop experiments, are being developed.
Current results, based on experimental work carried out on a small-scale quadrotor, show that a performance level comparable to that of model-based methods can be achieved.
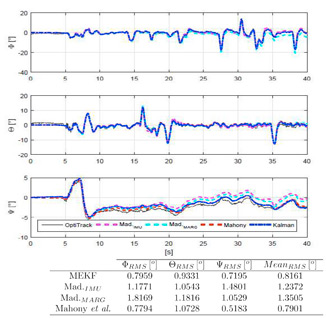
Nonlinear attitude determination:
• Problem: to develop stable filters for attitude determination without statistical assumptions on noise processes.
• Motivation: high performance, reliable methods for aircraft and spacecraft attitude determination.
• Approach: robust attitude determination formulated on the rotational group, i.e., no linearization such as in the EKF.
• Recent results: H ∞ filtering on the unit circle and on SO(3), providing better performance with respect to EKF and minimum energy filters.
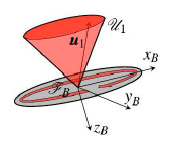
Nonlinear and geometric control for multibody systems:
• Problem: to develop large angles attitude control laws and corresponding position control laws.
• Motivation: joint attitude/position control for multirotor and tiltrotor UAVs.
• Approach: problem formulation in coordinate-free geometric framework for joint attitude/position control.
• Recent results:
-Nonlinear control for quadrotors.
-Nonlinear control for thrust-vectoring UAVs (e.g., tiltrotors).
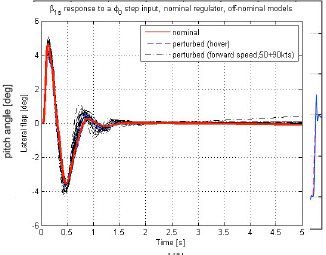
Structured robust multivariable control:
• Problem: to design robust multivariable controllers to match complex requirements such as provided by handling qualities regulations.
• Motivation: systematic, requirement-driven approach to flight control law design in a robust framework.
• Approach: structured H ∞ control
• Recent results: design approach for attitude control law design for multirotor UAVs, conventional helicopters, tiltrotors.